S tímto projektem jsem se zúčastnil několika soutěží ať již jako prezentaci samotné práce nebo při využití zařízení, která byla při práci vyvinuta.
Soupis jednotlivých soutěží i s výsledky a s odkazy na dokumentaci naleznete níže.
Eurobot Starter 2011
V roce 2011 jsem se se svým týmem zúčastnil celostátní soutěže Eurobot Starter v Praze, kde jsme s našim robotem (jmenoval se Chessbot) i díky přesnému a rychlému ovládání, vytvořeném v rámci tohoto projektu, vyhráli 1. místo.
Výsledky za rok 2011 (robot Chessbot)
Bear Rescue Beginner 2012 a 2013
Jelikož soutěž Eurobot Starter zanikla, přešli jsem na soutěž Bear Rescue Beginner, která se také konala v Praze v rámci Robotického dne 2012/2013.
V roce 2012 jsme po napínavém finálovém zápase skončili druzí, avšak o rok později, v roce 2013, jsme s novým týmem znovu dosáhli na absolutní vítězství.
Velkou část úspěchu tvořilo právě naše přesné a rychlé ovládání, které bylo optimalizované na danou soutěž.
Výsledky za rok 2012 (robot Chessbot)
Výsledky za rok 2013 (robot Xavier)
SOČ 2011 - obor 10 - Elektrotechnika - 3. místo v krajském kole
Zúčastnil jsem se také soutěže Středoškolská odborná činnost, kde jsem byl poprvé v roce 2011 s první verzí univerzálního dálkového ovládacího pultu.
V první generaci jsem vytvořil funkční prototyp, na kterém jsem odzkoušel fungování všech prvků, elektroniky a reálnou vyrobitelnost.
S prací jsem skončil na třetím místě v krajském kole.
Text práce: paral_soc_2011_text.pdf
SOČ 2012 - obor 10 - Elektrotechnika - 9. místo v celostátním kole
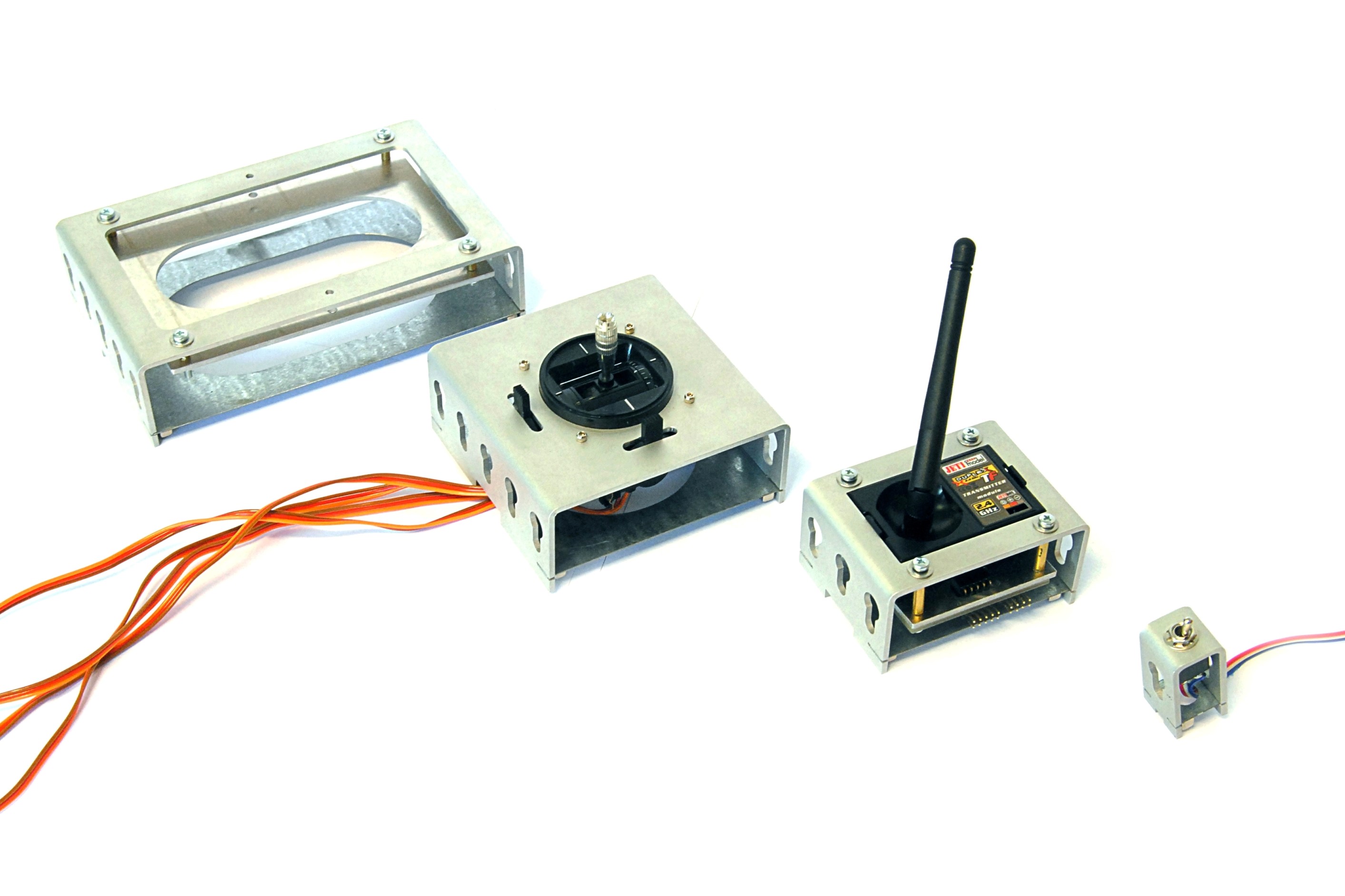
Následující rok jsem představoval moji druhou generaci pultu.
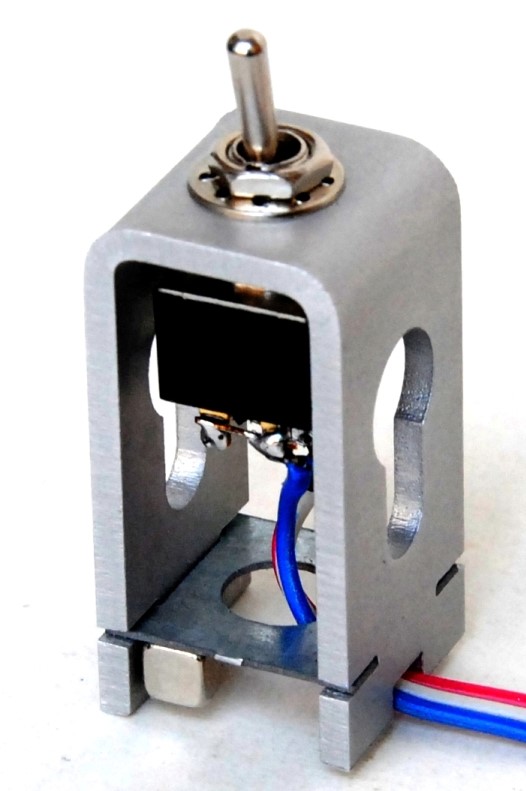
Ta byla založena na konceptu ovládacích modulů, které se vkládají do obalu ovladače a mohu si jejich rozložení libovolně upravovat a měnit.
Hlavní změny se odehráli v oblasti elektroniky, kde jsem přešel na novou koncepci a vytvořil tak od základu úplně novou elektroniku.
V roce 2012 jsme vyhrál 1. místo v krajském kole a postoupil jsem do celostátní přehlídky, která se ten rok konala v Kutné Hoře. V celostátním kole jsem skončil devátý, ale i kvůli velmi vysoké kvalitě ostatních prací, jsem byl s výsledkem spokojen.
Text práce: paral_soc_2012_text.pdf
Přílohy k práci: paral_soc_2012_prilohy.pdf
SOČ 2013 - obor 9 - Strojírenství - 1. místo v celostátním kole
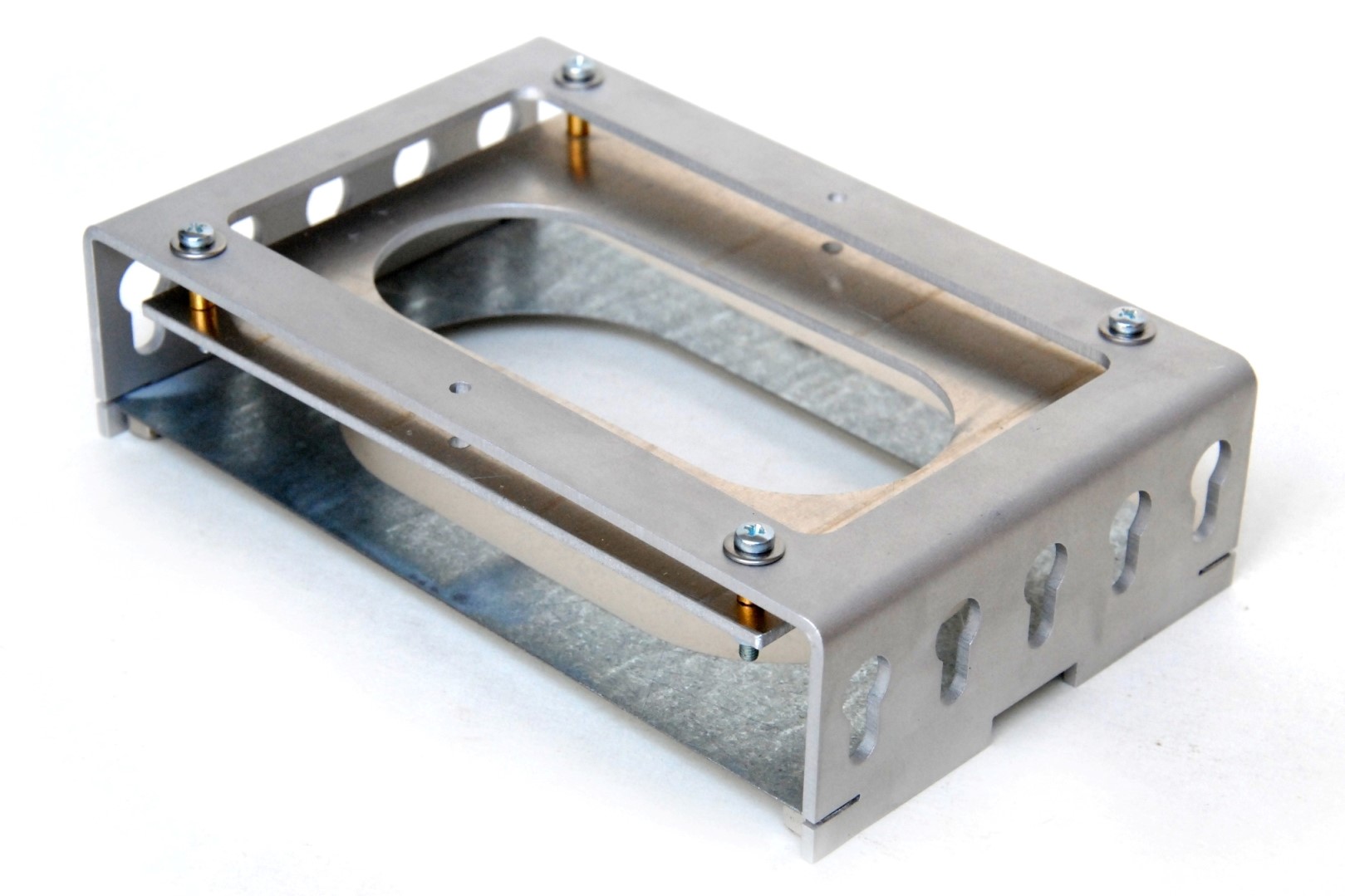
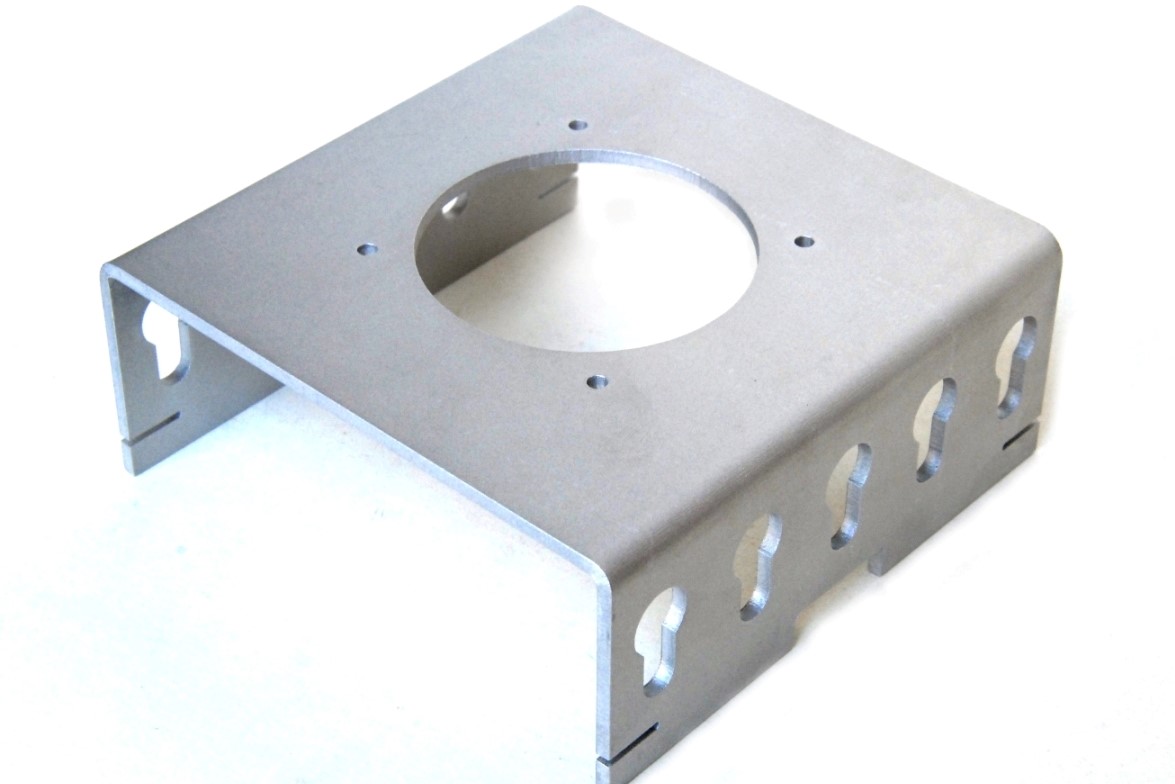
Práce na projektu pokračovali dále a já jsem se ve své třetí generaci zaměřil hlavně na mechanickou stránku věci a úpravy spojené s případnou kusovou výrobou.
Zároveň jsem se snažil doladit některé neduhy předchozí generace a představit v práci i mechanickou část, kterou jsem předtím neprezentoval.
Tato volba se ukázala jako velmi dobrá, jelikož mechanická stránka ovládacího pultu porotce velmi zaujala a i díky rozmanitosti celé práce (zasahuje jak do strojírenství, tak i do elektroniky a programování) jsem vyhrál 1. místo v celostátním kole a dosáhl jsem tím vytouženého úspěchu.
Text práce: paral_soc_2013_text_stroj.pdf
Přílohy k práci: paral_soc_2013_prilohy.pdf
Soutěz Mikrokontroléry letí 2012 - 1. místo v kategorii středoškoláci/jednotlivci
Byl jsem v soutěži "Mikrokontroléry letí". Zúčastnil jsem se prvního ročníku, který se konal v roce 2012. Soutěž probíhala pod záštitou Ústavu teoretické a experimentální elektrotechniky FEKT VUT v Brně.
S moji prací jsem vyhrál první místo v kategorii středoškoláci/jednotlivci.
V roce 2013 proběhl druhý ročník této soutěže, kterého jsem se již nezúčastnil. Doporučil bych každému zájemci o elektroniku a programování, aby se na tuto soutěž podíval.
Pro více informací navštivte web soutěže.